1.研究開始当初の背景
義肢の歴史は古く、紀元前950〜710 年に製作された足の義指が世界最古の義肢である。中世
時代でも鉄腕ゲッツの異名を持つゲッツ・ベルリヒンゲンの鋼鉄の義手が現存している。近代か
ら現在までは二回の世界大戦と様々な戦争により手足を失う傷痍軍人が急増し、本物の肉体に
近い外観再現を重視するエピテーゼ義肢の製作が発達してきた。50年前から市販された電動
義手も表面筋電位の閾値を用いたオン・オフ制御が多く、5本指を制御できる多自由度義手やロ
ボットの研究は常用化されていない。その理由は機能的な面を重視する電動義手は人間の骨格
系と異なるリンク構造を持っているのでシリコン皮膚を被せるだけでは皮膚の歪みが生じてし
まい、患者が装着することを好まないからである。最近、3D プリンターの普及により、子供用
の電動義手が安く製作することが可能になった。しかし、成人が使うにはトルクが足りないこと
や外観上の問題が解決できない。そこで、我々は人間の骨格系に基づいて作られた骨ロボットな
ら拳を握っても骨の形状により皮膚の歪みがなくなり自然な動作が可能になると考えた。
2.研究の目的
本研究では、上肢の一部を失った身体障がい者が物体とのインタラクションなど日常生活に
おける殆どの作業を行うことができ、外観上も本物の手と同様な多自由度電動義手の開発を行
っていた。
3.研究の方法
本研究では主に指と手首の電動義手を開発した。令和元年度には主に解剖学に基づいて指骨と
関節を新しく設計し、3D プリンターを用いて製作を行った。しかし、腱膜や靭帯などの弾力性
や骨の上に糸を通すトンネルなどが不自然であるなどさまざまな問題点があった。令和2 年度
では光造形式3D プリンターを購入したので材料をABS 材からUV レジン材に変更した。これ
により、指骨をより細かい部分までナチュラルかつ機能的な面を考慮した再設計が可能になっ
た。さらに、手首のモデルの設計も行い、球関節を手根骨の内部に埋め込むように設計した。
一方、人間のように粘弾性制御を行うためには各関節に伸筋と屈筋のペアが必要である。複数の
伸筋と屈筋を表す各モータを同時に制御するため、20chモータコントローラーの設計・製作
を行った。作られた20chモータコントローラーは小型(31cmx16 ㎝x3 ㎝)でパソコンと
の情報伝達を担当するメインマイコン1 個(STM32F103、ARM 社)と5 個のモータの制御を
担当するサブマイコン(STM32F302、ARM 社)4 個を用いて制御を行う。また、電源部と制御
部は完全に電気的に分離して設計を行った。
4.研究成果
本研究では2つの電動義手を開発した。まず、令和元年~1 年には主に解剖学に基づいて母指
に4自由度、その他の4指に各3自由度、合計16自由度の電動義手の設計・製作を行った。開
発した電動義手は人間の骨格系と同様な骨、靭帯、腱鞘、腱、筋肉、皮膚を再現し、日本人男性
の標準サイズの約1.1 倍(身長約190 ㎝男性)の大きさで設計した。さらに、表面筋電信号を用い
て日常生活に重要な4 種類の動作(握力把握、精密把持、側面把握、リラックス)に対して平均
90.8%の動作識別率を見せた。その結果を国際学術論文誌2 編、国際発表1 件で報告し、Excellent
Paper 賞を獲得した。
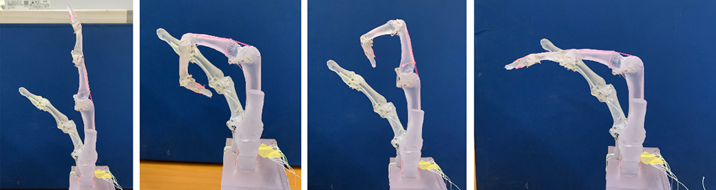
令和3年~4年ではさらに小型化を目指して日本女性の標準骨格サイズ(159㎝、52kg)に基づ
いた標準サイズの義手の製作が可能になった。ピンチング作業ができる2指の義手の開発を主
に行った。設計した第1指のIP関節・MP関節と第2指のDIP関節・PIP関節・MP関節についた
指骨3Dモデルでは人間と同様の可動域に従い, 過屈曲・過伸展を防ぐ関節構造を採用した。
第1指CM関節は鞍関節と呼ばれる2軸性関節を採用し設計を行った。靭帯も改善があり、精密
ネジとシリコンゴム紐によって靭帯を疑似的に再現し、粘弾力を持つ粘着剤で補強を行う方法
を考案した。腱鞘は指骨内にトンネルのような管を設計することで再現した。使用したモータ
も従来のRCモータではなく、金属材質の遊星ギヤを持つ超小型DCモータを採用した。さら
に、フィードバックセンサとしてシリコンと液体金属で構成されたセンサを特注し、骨に付け
た。動作実験では従来のロボットハンドではできなかった様々な繊細な指の動作が可能にな
り、人間の44%の力を発揮することに成功した。さらに、伸筋と屈筋を同時活性化することで
指のスティフネスを調節することも成功した。この結果を国際学術論文誌2編、国際発表1件で
報告した。
これまでの研究結果を研究室のホームページ(http://wrlab.t-kougei.ac.jp/)と東京工芸大学公
式ブログであるKOGEI PEOPLE(https://blog.t-kougei.ac.jp/mc/)に公開している。さらに、
前回、「A Design of Anthropomorphic Hand based on Human Finger Anatomy」タイトルで投
稿した国際会議(CcS2020)ではExcellent Paper 賞を受賞した。
1.S Narumi, X Huang, J Lee, H Kambara, Y Kang, D Shin;A design of biomimetic prosthetic hand、Actuators 11 (6), 167, 2022.
2. K Kawahara, D Shin, Y Ogai; Design of a Movable Tensegrity Arm with Springs Modeling an Upper and Lower Arm, Actuators 12 (1), 18, 2022.
3. 黄現松, 矢崎侑真,鳴海早久来,辛徳; 手首関節用のリハビリロボットの開発, 東京工芸大学工学部紀要 45 (1), 18-22, 2022.
4. C Chen et. al.; EEG-based anxious states classification using affective BCI-based closed neurofeedback system, Journal of medical and biological engineering 41, 155-164, 2021.
5. P Li et. al.; Brain patterns during single-and dual-task leg movements, Journal of Medical Imaging and Health Informatics 11 (3), 781-788, 2021.
6. H Kambara, H Ogawa, A Takagi, D Shin, N Yoshimura, Y Koike; Modulation of wrist stiffness caused by adaptation to stochastic environment, Advanced Robotics 35 (13-14), 818-834, 2021.
7. C Chen et. al.; Neural activities classification of left and right finger gestures during motor execution and motor imagery, Brain-Computer Interfaces 8 (4), 117-127, 2021.
8. Z He, RR Yurievich, S Shimizu, M Fukuda, Y Kang, D Shin; A design of anthropomorphic hand based on human finger anatomy, Advances in Science, Technology and Engineering Systems Journal, 6, 431-438, 2021.
9. 清水智, 坂田修一, 福田聖斗, 辛徳; 釣り糸を用いた人工筋肉を動作させるための制御装置の開発, 東京工芸大学工学部紀要 43 (1), 15-20, 2020.
10. 坂田修一,清水智,福田聖斗,辛徳; 深層学習を用いたロボットアームのピックアップ作業に関する研究, 東京工芸大学工学部紀要 43 (1), 10-14, 2020.