筋委縮性側索硬化症(ALS)患者や事故などで脊髄の損傷により部分・全身麻痺となった高位脊髄損傷患者は身体の運動が自由にできない.近年, BMI技術を用いれば四肢麻痺患者が念じるだけでコンピュータのカーソルなど外部機器を操作することが可能になった.最近のBMI分野では, 脳に傷をつけてしまう侵襲型BMIではなく, 脳自体を傷つけない低侵襲計測の皮質脳波(EcoG;頭蓋内の脳表面から計測される微弱な電気信号)が注目されている.皮質脳波は頭皮脳波(EEG)よりもノイズが少ないため, より高い識別精度で運動意図の推定が可能であることが示唆されている.しかし, 物体を持つ単純な動作でも, 脳は物体の重さを予測し, 腕の粘弾性特性を連続的に変化させて, 物体を受け取る自然な動作(インタラクション)を行うので, 腕の粘弾性をリアルタイムで予測しない限り自然な動作を再現することはとても難しい.
2.研究の目的
本研究の目的は皮質脳波から念じた運動に関する各関節の運動情報(関節角度, 角速度など)と力学情報(筋電信号, 関節トルク, 関節の粘弾性など)を同時に予測する手法を提案し, それを用いて電動義手やパワーアシストの粘弾性を制御する新たなリハビリテーションの基盤技術の構築を目指す.
3.研究の方法
(1) デコーディング手法の確立
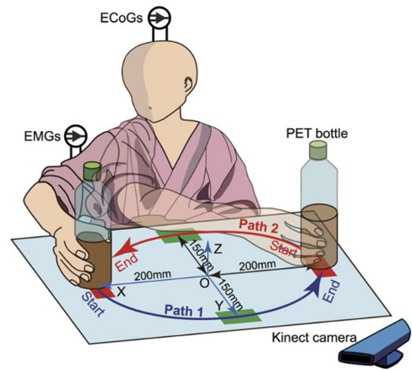
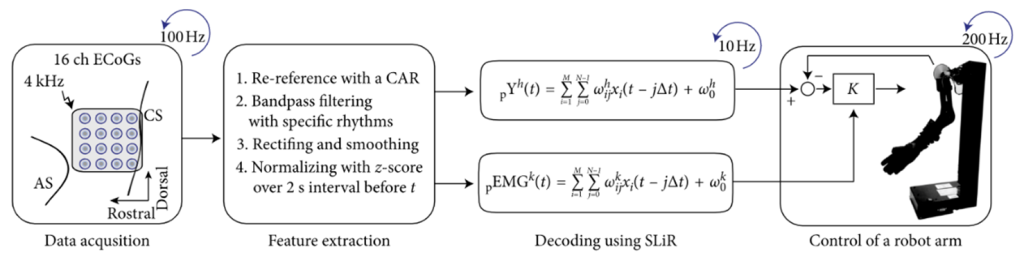
提案したデコーディング手法はz-score法を用いた特徴抽出法と変分ベイズ法を用いた線形回帰手法(sparse linear regression)を用いて筋電信号を予測するものである(Shin et al., PLoS ONE, 2012).本研究では重さが異なる3種類のペットボトルを用いた2点間の到達運動について, 3人の患者の皮質脳波から筋電信号と関節角度を同時に予測した.
(2) ロボットアームの制御
提案した手法の有効性を確認するため3Dプリンターを用いてロボットアームとパワーアシストを製作し, オンラインシミュレーションを行った.しかし, 患者の皮質脳波は治療の目的で電極を1週間しか入れないことと, 一次運動野におけるケースがかなり少ないため, サルの皮質脳波のデータを入手し, 同手法に基づいて関節角度を推定した.推定した関節角度を用いて4DOFのロボットアームの制御を行った.
4.研究成果
平成28年度では大阪大学病院から患者のデータを入手して解析を行い, 皮質脳波から運動情報と力学情報を同時に予測することに成功した.図1のように3人の被験者は重さが異なる3種類のペットボトル(25g, 250g, 500g)を指定した経由点を通過する2点間の到達運動を行なった.提案手法を用いて皮質脳波から力学情報(筋電信号)と運動情報(軌道)を再現することができた.この結果を学術論文誌(Nakanishi et. al., Scientific Reports, 7:45486)に発表した.
平成29年度では物体とのインタラクションが可能なパワーアシストの製作を行った.3Dプリンターを導入することでロボットアームの設計とプロトタイプのパワーアシストが製作できた.パワーアシストに人間のような粘弾性の性質を持たせるため, 空気圧の人口筋肉とリニアモータが直列で繋がっているシリアル型ハイブリッド人工筋肉を考案した.この人工筋肉は空気圧によって粘弾性の調節を, リニアモータによって筋肉の長さを制御する.さらに, パワーアシストに筋電信号の電極を埋め込む必要があるため柔らかい電極の開発もパワーアシスト製作と同時に設計を行った.この結果を国内外に発表した.
平成30年度ではこれまで得られた筋肉骨格系の数式モデルを使ってロボットアームやパワーアシストの制御に関して研究を行った.さらに, サルの皮質脳波のデータを入手し, 同手法に基づいて関節角度を推定した.推定した関節角度を用いて4DOFのロボットアームの制御に成功した.その結果を学術論文誌(Shin et. al., Computational Intelligence and Neuroscience)に発表した.さらに, 定常状態視覚誘発電位から3種類のパターンを認識し, 3Dプリンターで製作した電動義手の制御に成功した.
5.主な発表論文等
〔雑誌論文〕(計 5件)
① Zixun He, Aya Wakabayashi, Rezenko Roman Yurievich, Masayuki Sekiguchi, Yousun Kang, Yuta Ogai, Duk Shin, Development of a Prosthetic Hand Based on Human Anatomy, International Journal of Information and Electronics Engineering, 査読有, 2019, (accepted)
② Zixun He, Yuusuke Watanabe, Rezenko Roman Yurievich, Yousun Kang, Yuta Ogai, Duk Shin, Development of a support robot hand system using SSVEP, IT CoNvergence PRActice (INPRA), 査読有, Vol.6, No.4, 2018, pp.1-11
http://isyou.info/inpra/papers/inpra-v6n4-01.pdf
③ Duk Shin, Hiroyuki Kambara, Natsue Yoshimura, Yasuharu Koike, Control of a Robot Arm using decoded Joint angles from Electrocorticograms in Primate, Computational Intelligence and Neuroscience, 査読有, Vol.2018, e2580165, 2018, pp.1-10
https://doi.org/10.1155/2018/2580165
④ Kyuengbo Min, Duk Shin, Jongho Lee, Shinji Kakei, Electromyogram refinement using muscle synergy based regulation of uncertain information, Journal of Biomechanics, 査読有, Vol. 72, No. 4, 2018, pp.125-133
https://doi.org/10.1016/j.jbiomech.2018.03.020
⑤ Yasuhiko Nakanishi, Takuhumi Yanagisawa, Duk Shin et. al., Mapping ECoG channel contributions to trajectory and muscle activity prediction in human sensorimotor cortex, Scientific Reports, 査読有, vol.7, e45486, 2017, pp.1-10
https://doi.org/10.1038/srep45486
〔学会発表〕(計 3件)
① Zixun He, Aya Wakabayashi, Rezenko Roman Yurievich, Masayuki Sekiguchi, Yousun Kang, Duk Shin, Development of a Prosthetic Hand Based on Human Anatomy, ICMCR2019, 2019
② 渡辺 雄介, 何 梓遜, 米山 光, 辛 徳, 筋電信号を計測する柔らかいアクティブセンサの開発, 日本知能情報ファジィ学会, ファジィシステム シンポジウム 講演論文集, Vol.34, pp.312-313 2018
③ 何 梓遜, 渡辺 雄介, 米山 光, 辛 徳, SSVEPを用いたロボットハンド支援システムの開発, 日本知能情報ファジィ学会, ファジィシステム シンポジウム 講演論文集, Vol.34, pp.310-311 2018